LIDAR systems in embedded applications offer high-resolution 3D mapping by using laser pulses to measure precise distances, making them ideal for advanced obstacle detection and environmental modeling. RADAR, leveraging radio waves, provides superior performance in adverse weather and longer detection ranges, enhancing reliability in automotive and industrial embedded solutions. The choice between LIDAR and RADAR depends on the specific application requirements regarding accuracy, range, cost, and environmental conditions.
Table of Comparison
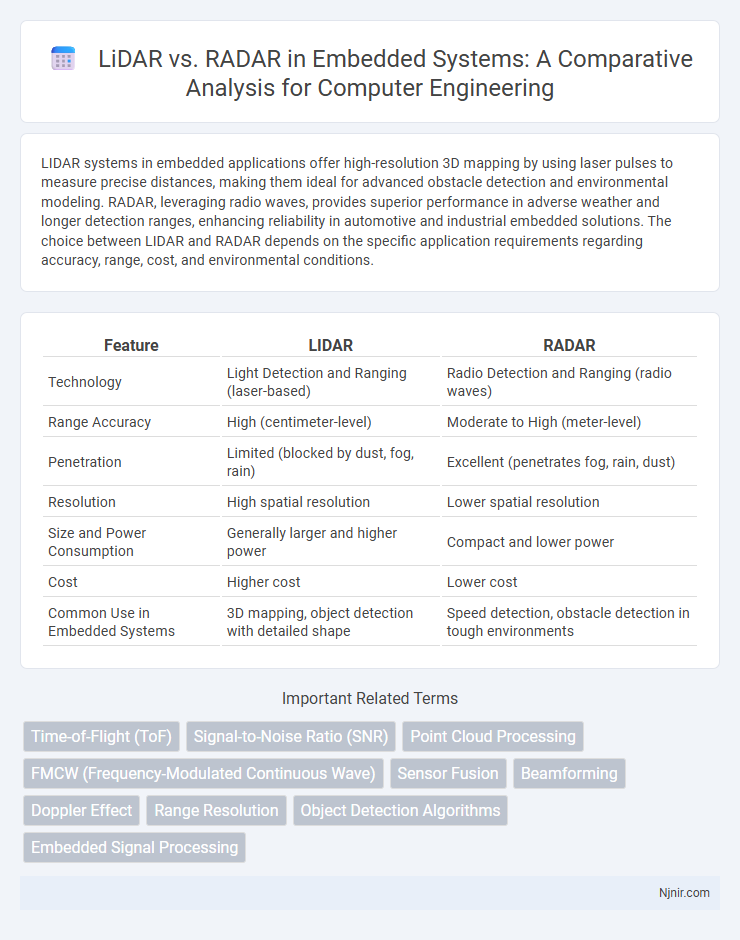
| Feature | LIDAR | RADAR |
|---|---|---|
| Technology | Light Detection and Ranging (laser-based) | Radio Detection and Ranging (radio waves) |
| Range Accuracy | High (centimeter-level) | Moderate to High (meter-level) |
| Penetration | Limited (blocked by dust, fog, rain) | Excellent (penetrates fog, rain, dust) |
| Resolution | High spatial resolution | Lower spatial resolution |
| Size and Power Consumption | Generally larger and higher power | Compact and lower power |
| Cost | Higher cost | Lower cost |
| Common Use in Embedded Systems | 3D mapping, object detection with detailed shape | Speed detection, obstacle detection in tough environments |
Introduction to LIDAR and RADAR in Embedded Systems
LIDAR and RADAR are essential sensing technologies in embedded systems, providing precise environmental data for applications such as autonomous vehicles and robotics. LIDAR uses laser pulses to create high-resolution 3D maps by measuring the time it takes for light to reflect from objects, offering detailed spatial information ideal for obstacle detection and navigation. RADAR employs radio waves to detect object distance and velocity, excelling in adverse weather conditions and longer-range detection, making it crucial for adaptive cruise control and collision avoidance systems in embedded platforms.
Core Working Principles: LIDAR vs RADAR
LIDAR uses laser light pulses to measure distances by calculating the time it takes for the light to reflect off objects and return to the sensor, enabling high-resolution 3D mapping in embedded systems. RADAR employs radio waves to detect objects by transmitting radio signals and analyzing the frequency shift of the returned signals caused by the Doppler effect, providing robust performance in various weather conditions. Both technologies are integral to embedded systems, with LIDAR offering precise spatial information while RADAR excels in range detection and velocity measurement.
Key Components and Integration Challenges
LIDAR systems in embedded applications rely on laser emitters, photodetectors, and precise timing modules to generate high-resolution 3D maps, while RADAR integrates radio frequency transceivers, antennas, and signal processors optimized for long-range object detection. Key integration challenges include managing power consumption, minimizing electromagnetic interference, and ensuring real-time data processing within limited embedded hardware resources. Synchronization between sensor data streams and fusion with other embedded system components demands advanced firmware algorithms and robust hardware interfaces.
Performance Metrics: Range, Resolution, and Accuracy
LIDAR in embedded systems offers superior resolution and accuracy with detailed 3D mapping capabilities at ranges typically up to 200 meters, making it ideal for detecting small objects with precision. RADAR provides longer detection range, often exceeding 250 meters, with robust performance in adverse weather conditions but lower resolution compared to LIDAR. Accuracy in RADAR systems is generally limited by lower spatial resolution, while LIDAR's laser-based measurements enable precise distance calculations and object differentiation essential for automotive and robotic applications.
Size, Power, and Cost Considerations
LIDAR sensors in embedded systems typically offer higher resolution and accuracy but often come with larger size, higher power consumption, and increased cost compared to RADAR units. RADAR modules are generally more compact, consume less power, and are cost-effective, making them suitable for applications requiring long-range detection with moderate precision. The choice between LIDAR and RADAR depends heavily on the specific embedded system's requirements for spatial resolution, power efficiency, and budget constraints.
Noise Susceptibility and Environmental Robustness
LIDAR systems in embedded applications excel in spatial resolution but are highly susceptible to noise from environmental factors such as fog, rain, and dust, which cause signal attenuation and scattering. RADAR offers superior environmental robustness with lower noise susceptibility, maintaining reliable performance in adverse conditions like fog, rain, and smoke due to its longer wavelength electromagnetic waves. Choosing between LIDAR and RADAR depends on the trade-off between high-resolution data acquisition and consistent functionality across varying environmental conditions.
Application Domains in Embedded Systems
LIDAR excels in embedded systems requiring precise 3D mapping and object detection, such as autonomous vehicles and robotics, due to its high-resolution spatial data. RADAR is preferred in embedded applications like automotive collision avoidance and industrial monitoring, offering robust performance under various weather conditions and longer range detection. Embedded systems leverage the complementary strengths of LIDAR's detailed imaging and RADAR's reliable distance measurement to enhance situational awareness and safety in dynamic environments.
Data Processing and Real-Time Constraints
LIDAR generates high-resolution 3D point clouds requiring extensive data processing power and complex algorithms to interpret spatial environments in embedded systems. RADAR, with lower-resolution range and velocity data, demands less computational intensity and simpler real-time signal processing, enabling faster reaction times under strict latency constraints. Embedded systems integrating LIDAR must optimize hardware accelerators and parallel processing architectures, whereas RADAR systems prioritize efficient real-time filtering and Doppler data extraction for time-critical applications.
Security and Privacy Implications
LIDAR in embedded systems offers high-resolution 3D mapping, enhancing object detection but raises privacy concerns due to detailed environmental scanning that can capture identifiable personal data. RADAR provides robust detection through radio waves with lower spatial resolution, reducing risks of capturing sensitive visual information but potentially exposing location data through signal tracking. Security implications involve protecting system data from interception and tampering, with LIDAR requiring stronger encryption for detailed maps, while RADAR demands safeguards against spoofing and jamming attacks to ensure reliable operation.
Future Trends in LIDAR and RADAR for Embedded Systems
Future trends in LIDAR and RADAR for embedded systems highlight advancements in sensor miniaturization, increased resolution, and integration with AI for real-time data processing. LIDAR technology is evolving towards solid-state designs, enabling higher durability and lower power consumption, while RADAR systems are enhancing their range and object detection capabilities in complex environments. These improvements drive the adoption of autonomous vehicles, drones, and IoT devices by providing more precise environmental mapping and obstacle avoidance.
Time-of-Flight (ToF)
LIDAR employs Time-of-Flight (ToF) measurement using laser pulses for high-resolution 3D mapping in embedded systems, whereas RADAR uses radio wave ToF for long-range object detection with lower spatial resolution.
Signal-to-Noise Ratio (SNR)
LIDAR in embedded systems typically achieves higher Signal-to-Noise Ratio (SNR) than RADAR due to its use of coherent laser light, enabling more precise distance measurements and better target resolution in cluttered environments.
Point Cloud Processing
LIDAR in embedded systems offers high-resolution point cloud processing for precise 3D mapping and object detection, whereas RADAR provides lower-resolution data optimized for velocity measurement and robust performance in diverse weather conditions.
FMCW (Frequency-Modulated Continuous Wave)
FMCW radar in embedded systems offers superior range resolution and velocity detection compared to LIDAR, leveraging continuous frequency modulation to provide precise distance and speed measurements in diverse environments.
Sensor Fusion
LIDAR provides high-resolution 3D spatial data while RADAR offers robust long-range object detection in embedded systems, and sensor fusion combines these strengths to enhance environmental perception accuracy and reliability.
Beamforming
Beamforming in embedded systems enhances LIDAR's spatial resolution by precisely directing laser pulses, while RADAR uses beamforming to improve signal detection and target discrimination through phased antenna arrays.
Doppler Effect
LIDAR systems use laser pulses to measure precise distances and object shapes but lack Doppler-effect-based velocity detection, whereas RADAR systems employ radio waves and utilize the Doppler effect to accurately measure object speed in embedded systems.
Range Resolution
LIDAR offers superior range resolution in embedded systems by using laser pulses with shorter wavelengths compared to RADAR's radio waves, enabling more precise distance measurements and object detection.
Object Detection Algorithms
LIDAR-based object detection algorithms in embedded systems provide higher-resolution 3D spatial data for precise environment mapping, while RADAR algorithms excel in detecting object velocity and range under adverse weather conditions using Doppler effects.
Embedded Signal Processing
LIDAR in embedded systems offers higher-resolution spatial data through optical signal processing, while RADAR relies on radio frequency signal processing for robust object detection in diverse environmental conditions.
LIDAR vs RADAR (in embedded systems) Infographic