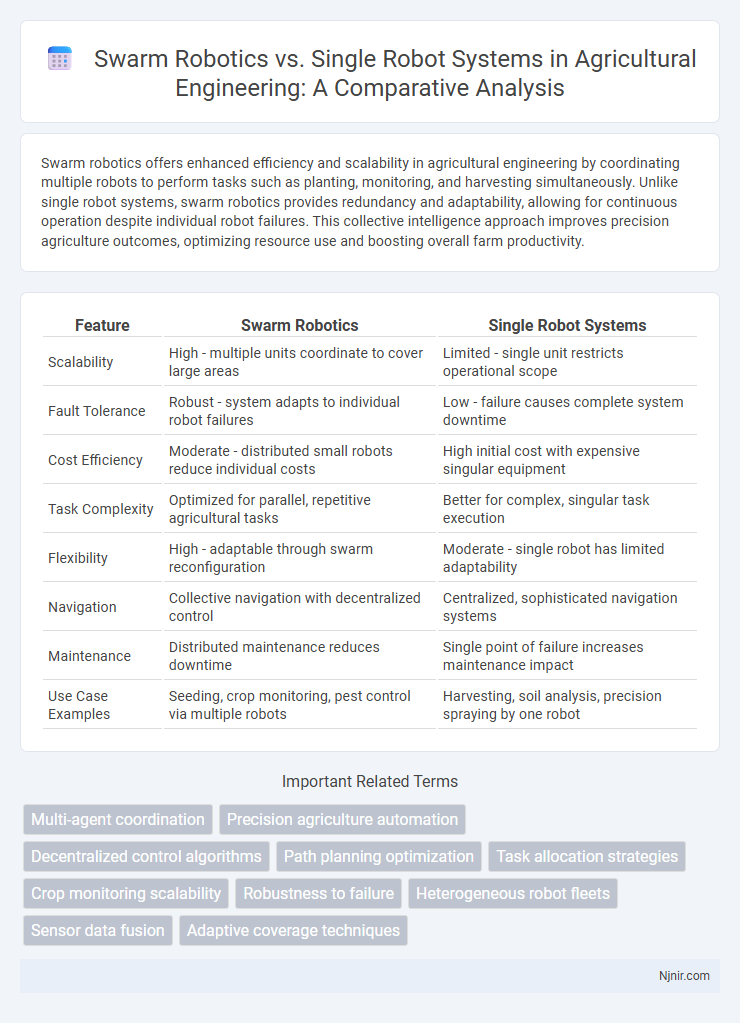
Swarm robotics offers enhanced efficiency and scalability in agricultural engineering by coordinating multiple robots to perform tasks such as planting, monitoring, and harvesting simultaneously. Unlike single robot systems, swarm robotics provides redundancy and adaptability, allowing for continuous operation despite individual robot failures. This collective intelligence approach improves precision agriculture outcomes, optimizing resource use and boosting overall farm productivity.
Table of Comparison
| Feature | Swarm Robotics | Single Robot Systems |
|---|---|---|
| Scalability | High - multiple units coordinate to cover large areas | Limited - single unit restricts operational scope |
| Fault Tolerance | Robust - system adapts to individual robot failures | Low - failure causes complete system downtime |
| Cost Efficiency | Moderate - distributed small robots reduce individual costs | High initial cost with expensive singular equipment |
| Task Complexity | Optimized for parallel, repetitive agricultural tasks | Better for complex, singular task execution |
| Flexibility | High - adaptable through swarm reconfiguration | Moderate - single robot has limited adaptability |
| Navigation | Collective navigation with decentralized control | Centralized, sophisticated navigation systems |
| Maintenance | Distributed maintenance reduces downtime | Single point of failure increases maintenance impact |
| Use Case Examples | Seeding, crop monitoring, pest control via multiple robots | Harvesting, soil analysis, precision spraying by one robot |
Introduction to Swarm Robotics and Single Robot Systems
Swarm robotics involves the coordination of multiple robots that work collectively to perform complex tasks through decentralized control and simple individual behaviors, inspired by natural systems such as insect colonies. Single robot systems rely on a solitary robot equipped with advanced sensors and processing capabilities to execute specific tasks independently, often requiring centralized control and detailed planning. The scalability and robustness of swarm robotics contrast with the precision and complexity achievable by single robot systems, highlighting different approaches in robotic design and application.
Core Principles of Swarm Robotics in Agriculture
Swarm robotics in agriculture leverages decentralized control, redundancy, and local communication among multiple simple robots to enhance efficiency and resilience in tasks like planting, monitoring, and harvesting. Unlike single robot systems, swarms exhibit collective behavior through self-organization, enabling scalable and adaptive solutions for dynamic farming environments. Core principles include robustness against individual failures, parallel task execution, and emergent coordination without centralized oversight.
Key Functions of Single Robot Systems in Farming
Single robot systems in farming specialize in targeted tasks such as soil analysis, precision planting, and crop monitoring using advanced sensors and GPS technology. These robots optimize efficiency through autonomous navigation and machine learning algorithms, enabling precise interventions like weed removal and pesticide application. Their key functions focus on enhancing productivity and minimizing resource waste by performing specific operations with high accuracy in controlled environments.
Comparative Efficiency: Swarm vs Single Robot Approaches
Swarm robotics enhance efficiency through distributed task execution, enabling parallel processing and increased fault tolerance compared to single robot systems, which rely on centralized control and limited scalability. Swarms can dynamically adapt to complex environments by leveraging collective intelligence, whereas single robots may face challenges in handling diverse or large-scale operations independently. This decentralized approach results in improved robustness and faster completion of tasks in applications such as search and rescue, environmental monitoring, and agricultural automation.
Scalability in Field Operations
Swarm robotics offers superior scalability in field operations by enabling numerous simple robots to work collectively, adapting dynamically to the size and complexity of tasks without significant performance loss. Single robot systems often struggle to scale efficiently due to limitations in hardware capacity and increased operational risk when deployed in larger numbers. The distributed nature of swarm robotics enhances fault tolerance and task flexibility, making it ideal for expansive environments like agriculture, disaster response, and environmental monitoring.
Robustness and Fault Tolerance in Agricultural Tasks
Swarm robotics enhances robustness and fault tolerance in agricultural tasks by distributing work across multiple autonomous units, reducing the impact of individual robot failures on overall system performance. In contrast, single robot systems face significant operational disruptions if a malfunction occurs, as all critical tasks depend on one machine. Swarm systems also enable dynamic task redistribution and collective problem-solving, increasing resilience in unpredictable farming environments.
Cost Analysis: Investment and Maintenance
Swarm robotics systems typically incur higher initial investment costs due to the need for multiple coordinated units, sophisticated communication protocols, and advanced control algorithms. However, maintenance expenses can be lower compared to single robot systems because the distributed nature of swarms allows for redundancy and minimizes the impact of individual unit failures. In contrast, single robot systems often have higher maintenance costs per unit but require less upfront investment, making them more cost-effective for simpler or smaller-scale applications.
Data Collection and Analysis Capabilities
Swarm robotics leverage multiple autonomous agents working collaboratively to enhance data collection by covering larger areas with diverse sensor arrays, enabling real-time, high-resolution environmental mapping. In contrast, single robot systems rely on individual sensors, limiting spatial coverage but potentially offering deeper, more precise data analysis focused on specific tasks. The distributed nature of swarm robotics supports robust, scalable data aggregation and fault tolerance, improving analysis accuracy through consensus algorithms and collective intelligence approaches.
Practical Applications and Case Studies
Swarm robotics leverages multiple coordinated robots to perform complex tasks such as environmental monitoring, agricultural automation, and search-and-rescue missions, demonstrating enhanced scalability and fault tolerance compared to single robot systems. Case studies in disaster response highlight swarms' ability to cover large areas rapidly, while precision farming uses robotic swarms for simultaneous crop monitoring and management, outperforming individual robots in efficiency and adaptability. Single robot systems remain effective in specialized applications like surgical robotics and industrial automation, where precision and controlled environments are paramount.
Future Trends in Agricultural Robotics
Swarm robotics in agriculture enables scalable, flexible, and resilient crop monitoring and management by coordinating multiple small robots that communicate and work collectively, surpassing the limitations of single robot systems in coverage and fault tolerance. Future trends emphasize the integration of AI-driven swarm intelligence, real-time data analytics, and autonomous adaptation to dynamic farm conditions, enhancing precision in planting, irrigation, and pest control. Advances in energy-efficient communication protocols and modular hardware platforms will further accelerate the deployment of swarm robotics as a sustainable solution for smart farming.
Multi-agent coordination
Swarm robotics enhances multi-agent coordination by leveraging decentralized control and collective behavior, enabling scalable, robust, and flexible task execution compared to single robot systems.
Precision agriculture automation
Swarm robotics in precision agriculture automation enhances crop monitoring and pest control efficiency through decentralized coordination and scalability, outperforming single robot systems in adaptability and coverage.
Decentralized control algorithms
Swarm robotics employs decentralized control algorithms that enable multiple robots to collaboratively perform tasks with enhanced scalability and fault tolerance compared to single robot systems relying on centralized control.
Path planning optimization
Swarm robotics employs decentralized path planning algorithms to optimize navigation efficiency and robustness, outperforming single robot systems that rely on centralized, computationally intensive path planning methods.
Task allocation strategies
Swarm robotics employs decentralized, bio-inspired task allocation strategies enhancing scalability and fault tolerance, whereas single robot systems rely on centralized, pre-programmed task allocation that often limits adaptability and robustness.
Crop monitoring scalability
Swarm robotics offers superior scalability in crop monitoring by enabling multiple robots to collaboratively cover large agricultural areas efficiently, unlike single robot systems which face limitations in coverage and adaptability.
Robustness to failure
Swarm robotics exhibit greater robustness to failure compared to single robot systems due to decentralized control and redundancy, enabling continued operation despite individual unit malfunctions.
Heterogeneous robot fleets
Heterogeneous robot fleets in swarm robotics enhance task flexibility, resilience, and efficiency by combining diverse specialized units, outperforming single robot systems in complex, dynamic environments.
Sensor data fusion
Swarm robotics leverages distributed sensor data fusion across multiple robots to enhance environmental perception and robustness, outperforming single robot systems that rely on limited, centralized sensor inputs.
Adaptive coverage techniques
Swarm robotics employ distributed adaptive coverage techniques for scalable and fault-tolerant area monitoring, outperforming single robot systems that rely on centralized control and limited adaptability.
Swarm robotics vs Single robot systems Infographic