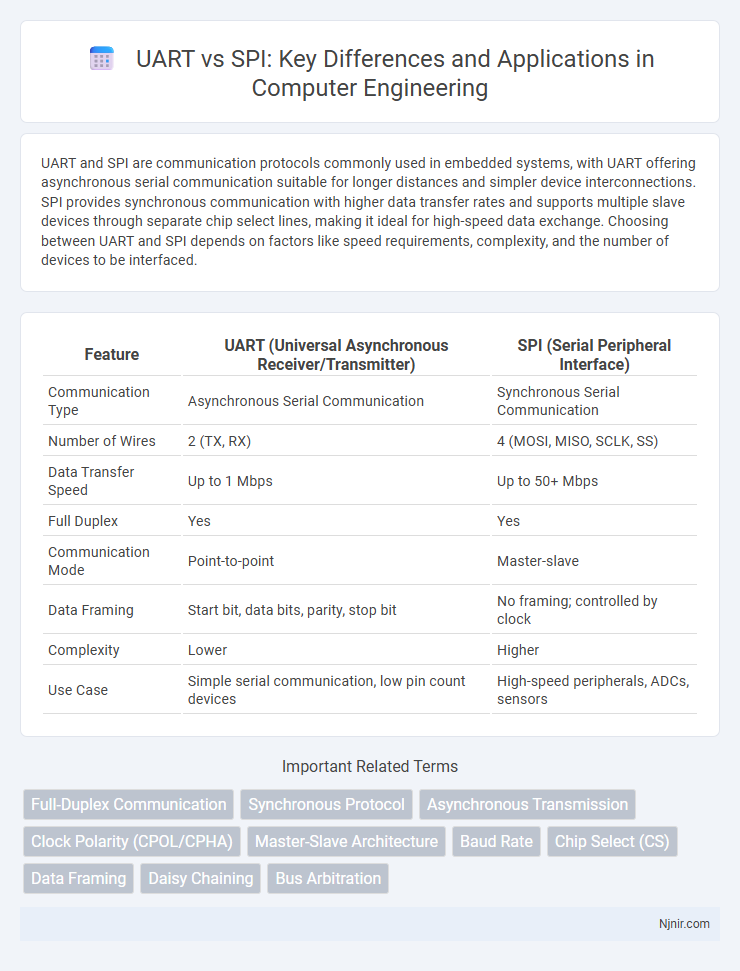
UART and SPI are communication protocols commonly used in embedded systems, with UART offering asynchronous serial communication suitable for longer distances and simpler device interconnections. SPI provides synchronous communication with higher data transfer rates and supports multiple slave devices through separate chip select lines, making it ideal for high-speed data exchange. Choosing between UART and SPI depends on factors like speed requirements, complexity, and the number of devices to be interfaced.
Table of Comparison
| Feature | UART (Universal Asynchronous Receiver/Transmitter) | SPI (Serial Peripheral Interface) |
|---|---|---|
| Communication Type | Asynchronous Serial Communication | Synchronous Serial Communication |
| Number of Wires | 2 (TX, RX) | 4 (MOSI, MISO, SCLK, SS) |
| Data Transfer Speed | Up to 1 Mbps | Up to 50+ Mbps |
| Full Duplex | Yes | Yes |
| Communication Mode | Point-to-point | Master-slave |
| Data Framing | Start bit, data bits, parity, stop bit | No framing; controlled by clock |
| Complexity | Lower | Higher |
| Use Case | Simple serial communication, low pin count devices | High-speed peripherals, ADCs, sensors |
Introduction to UART and SPI
UART (Universal Asynchronous Receiver/Transmitter) is a serial communication protocol that transmits data asynchronously using two wires--TX (transmit) and RX (receive)--primarily for short-distance, low-speed communication between microcontrollers and peripheral devices. SPI (Serial Peripheral Interface) is a synchronous serial communication protocol that employs multiple lines, including MOSI (Master Out Slave In), MISO (Master In Slave Out), SCLK (Serial Clock), and SS (Slave Select), enabling full-duplex communication with higher data transfer rates and precise timing control. Both UART and SPI serve crucial roles in embedded systems, with UART favored for simplicity and SPI preferred for speed and multiple device connectivity.
Overview of Serial Communication Protocols
UART and SPI are primary serial communication protocols used in embedded systems for data exchange between microcontrollers and peripherals. UART (Universal Asynchronous Receiver/Transmitter) operates asynchronously with a start and stop bit to synchronize data, making it suitable for point-to-point, low-speed communication. SPI (Serial Peripheral Interface) uses a synchronous clock signal with separate MOSI, MISO, SCLK, and SS lines, enabling higher-speed, full-duplex communication ideal for master-slave device architectures.
Architecture and Operation of UART
UART (Universal Asynchronous Receiver/Transmitter) architecture features a simple design with separate transmit and receive lines, functioning asynchronously without a clock signal. Data is transmitted bit by bit, framed with start and stop bits to signal the beginning and end of each byte, enabling reliable serial communication. The UART operates by converting parallel data from a microcontroller into serial form for transmission, then reconverting received serial data back into parallel form for processing.
Architecture and Operation of SPI
SPI architecture features a full-duplex synchronous serial communication system utilizing separate lines for data input (MISO), data output (MOSI), clock (SCLK), and chip select (CS), enabling simultaneous data transmission and reception. Data synchronization occurs with the clock pulses generated by the master device, which precisely controls data flow timing on the MOSI and MISO lines. This structured operation supports high-speed data transfer rates and efficient communication with multiple peripherals through independent chip select signals.
Key Differences Between UART and SPI
UART uses asynchronous serial communication with two wires for data transmission (TX and RX), while SPI employs synchronous serial communication with multiple lines including MOSI, MISO, SCLK, and SS for full-duplex data transfer. UART supports point-to-point connections with variable data bits, parity, and stop bits settings, whereas SPI enables multiple slave devices through dedicated slave select lines and offers faster data rates due to its clock-driven protocol. The data framing in UART includes start and stop bits for synchronization, contrasting with SPI's continuous clock pulse-driven data exchange without start/stop bits.
Data Transfer Speed and Efficiency Comparison
SPI offers significantly higher data transfer speeds, often reaching tens of Mbps, compared to UART's maximum typical speed of 1 Mbps, making SPI ideal for applications requiring fast data exchange. SPI's full-duplex communication and synchronous clock signal improve efficiency by allowing simultaneous send and receive operations without start and stop bits overhead. UART uses asynchronous transmission with start and stop bits, causing lower throughput and increased overhead, reducing overall data transfer efficiency in comparison to SPI.
Hardware Requirements and Pin Configuration
UART requires only two pins--TX (transmit) and RX (receive)--making it simpler for serial communication but limited to point-to-point connections. SPI needs at least four pins: MOSI (Master Out Slave In), MISO (Master In Slave Out), SCLK (Serial Clock), and SS (Slave Select) for full-duplex communication and supporting multiple slave devices. SPI's pin configuration supports higher data transfer rates and synchronized clocking, whereas UART's asynchronous communication relies on precise baud rate matching between devices.
Use Cases and Application Scenarios
UART is commonly used for serial communication in low-speed, point-to-point connections such as microcontroller to GPS modules or Bluetooth devices. SPI excels in high-speed data transfer scenarios between a microcontroller and peripherals like sensors, memory chips, or displays requiring multiple slave devices. In embedded systems, UART is favored for simple asynchronous serial data exchange, whereas SPI is chosen for synchronized, full-duplex communication demanding higher throughput and lower latency.
Advantages and Limitations of UART and SPI
UART offers simple, cost-effective full-duplex serial communication ideal for low-speed data exchange and long-distance communication, but its slower data rate and lack of standard clock signal can limit synchronization and speed. SPI provides high-speed synchronous communication with flexible data transfer and multiple slave connectivity, enabling precise timing control and efficient full-duplex data exchange; however, it requires more pins and hardware complexity, making it less suitable for long-distance transmissions. Choosing between UART and SPI depends on application needs such as speed, wiring complexity, distance, and device interoperability.
Choosing the Right Protocol for Your Project
Choosing the right protocol between UART and SPI depends on your project's requirements for speed, complexity, and distance. UART is ideal for simple, low-speed, point-to-point communication with minimal wiring, while SPI excels in high-speed data transfer and supports multiple devices using separate chip select lines. Evaluate factors such as data rate, number of devices, and wiring complexity to determine whether UART's asynchronous serial communication or SPI's synchronous multi-device interface better suits your application.
Full-Duplex Communication
SPI supports full-duplex communication by simultaneously transmitting and receiving data on separate lines, whereas UART typically operates in half-duplex mode, sending and receiving data alternately on a single wire pair.
Synchronous Protocol
SPI is a synchronous communication protocol that uses a clock signal for precise data synchronization between devices, unlike UART which is asynchronous and relies on start and stop bits.
Asynchronous Transmission
UART enables asynchronous transmission by sending data without a shared clock signal, relying on start and stop bits for synchronization, whereas SPI requires a synchronous clock for data transfer.
Clock Polarity (CPOL/CPHA)
SPI communication requires careful configuration of Clock Polarity (CPOL) and Clock Phase (CPHA) to synchronize data transfer, while UART does not use CPOL or CPHA since it relies on asynchronous signaling.
Master-Slave Architecture
SPI employs a master-slave architecture with a single master controlling multiple slaves through separate chip select lines, while UART communication is typically point-to-point without a formal master-slave hierarchy.
Baud Rate
UART typically supports baud rates up to 115,200 bps for standard communication, whereas SPI can achieve significantly higher data transfer rates exceeding several Mbps due to its clock-driven synchronization.
Chip Select (CS)
SPI requires a dedicated Chip Select (CS) line to enable specific slave devices, whereas UART does not use a Chip Select signal because it is designed for point-to-point communication without multiple slave selection.
Data Framing
UART uses start and stop bits with parity for asynchronous data framing, while SPI employs a synchronous clock-driven framing without start or stop bits, enabling faster and more reliable data transfer.
Daisy Chaining
SPI supports efficient daisy chaining by connecting multiple devices in series through its MOSI and MISO lines, while UART lacks native daisy chaining capability and requires additional hardware for multi-device communication.
Bus Arbitration
SPI uses a master-slave architecture eliminating bus arbitration, while UART operates asynchronously without bus arbitration mechanisms.
UART vs SPI Infographic