Glider-based UAVs offer superior energy efficiency and longer endurance by harnessing natural air currents, making them ideal for sustained surveillance missions. Powered UAVs provide greater maneuverability and payload capacity, suitable for tasks requiring precise control and active propulsion. Selecting between the two depends on mission requirements, with gliders excelling in passive flight conditions and powered UAVs dominating in versatile operational scenarios.
Table of Comparison
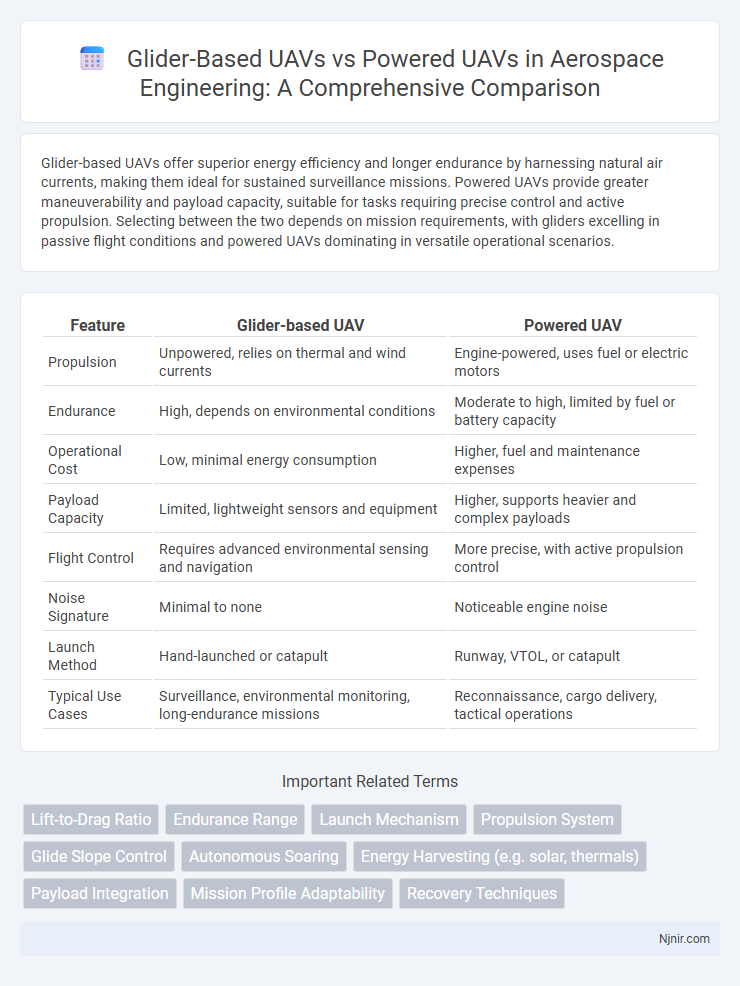
| Feature | Glider-based UAV | Powered UAV |
|---|---|---|
| Propulsion | Unpowered, relies on thermal and wind currents | Engine-powered, uses fuel or electric motors |
| Endurance | High, depends on environmental conditions | Moderate to high, limited by fuel or battery capacity |
| Operational Cost | Low, minimal energy consumption | Higher, fuel and maintenance expenses |
| Payload Capacity | Limited, lightweight sensors and equipment | Higher, supports heavier and complex payloads |
| Flight Control | Requires advanced environmental sensing and navigation | More precise, with active propulsion control |
| Noise Signature | Minimal to none | Noticeable engine noise |
| Launch Method | Hand-launched or catapult | Runway, VTOL, or catapult |
| Typical Use Cases | Surveillance, environmental monitoring, long-endurance missions | Reconnaissance, cargo delivery, tactical operations |
Introduction to Glider-Based and Powered UAVs
Glider-based UAVs rely on aerodynamic lift and natural air currents for sustained flight, offering energy efficiency and longer endurance compared to powered UAVs that utilize onboard engines or motors. Powered UAVs provide greater control, maneuverability, and payload capacity, making them suitable for diverse missions requiring precise navigation and extended operational capabilities. The choice between glider-based and powered UAVs depends on mission requirements such as flight duration, energy consumption, payload, and environmental conditions.
Design Principles: Glider vs Powered UAVs
Glider-based UAVs emphasize aerodynamic efficiency with lightweight structures and optimized wing designs to maximize lift-to-drag ratio for sustained unpowered flight. Powered UAVs integrate propulsion systems, requiring reinforced airframes to support engines and fuel, balancing thrust capabilities with weight to achieve controlled, powered maneuvers. Design principles for gliders prioritize passive energy conservation and extended endurance, while powered UAVs focus on power-to-weight ratio and system integration to enhance speed, maneuverability, and payload capacity.
Aerodynamics and Flight Efficiency
Glider-based UAVs leverage high aspect ratio wings and low drag airframes to maximize lift-to-drag ratios, enabling extended flight endurance through efficient use of thermals and atmospheric currents. Powered UAVs rely on onboard propulsion systems that provide thrust independent of environmental lift but typically exhibit higher drag and energy consumption due to engine weight and reduced aerodynamic optimization. The aerodynamic refinement of gliders results in superior flight efficiency under favorable conditions, whereas powered UAVs offer greater operational flexibility and consistent performance in diverse environments.
Power Systems and Endurance Comparison
Glider-based UAVs utilize aerodynamic lift from thermal currents or slopes, relying on minimal or no onboard power systems, which leads to significantly longer endurance compared to powered UAVs that depend on batteries, fuel cells, or internal combustion engines. The absence of continuous power consumption in glider-based UAVs reduces weight and energy demands, enabling flights that can last several hours or even days under optimal atmospheric conditions. Powered UAVs offer greater control and payload capacity but typically face endurance limitations constrained by fuel capacity and power system efficiency.
Payload Capabilities and Limitations
Glider-based UAVs offer extended flight durations due to their efficient aerodynamics but typically have limited payload capacity, restricting them to lightweight sensors and minimal equipment. Powered UAVs can carry heavier payloads, including advanced cameras, LiDAR, and communication devices, enabling diverse mission applications. However, the increased payload weight reduces flight time and increases energy consumption, creating a trade-off between endurance and equipment complexity.
Launch and Recovery Methods
Glider-based UAVs primarily rely on winch launches, hand throws, or catapults for takeoff, enabling quiet and energy-efficient deployment without onboard engines. Recovery typically involves unpowered landings on soft surfaces or nets, minimizing mechanical complexity and maintenance needs. Powered UAVs use conventional takeoff methods such as runway or vertical takeoff and landing (VTOL) systems, followed by engine-driven landings requiring precise control and runway or designated landing areas.
Operational Environments and Applications
Glider-based UAVs excel in environments with strong thermal currents or ridge lift, making them ideal for long-duration surveillance, environmental monitoring, and scientific data collection without frequent refueling. Powered UAVs offer versatile operation across diverse terrains and weather conditions, supporting applications such as aerial photography, delivery services, and tactical reconnaissance with greater speed and maneuverability. Both types serve complementary roles, where gliders provide endurance and efficiency, while powered UAVs deliver precise control and immediate responsiveness.
Cost and Maintenance Considerations
Glider-based UAVs typically have lower operational costs due to their simpler design, which eliminates the need for engines and fuel, reducing maintenance requirements drastically. Powered UAVs incur higher expenses stemming from complex propulsion systems, frequent engine maintenance, and the cost of fuel or batteries. Maintenance considerations favor gliders for long-term deployments where reliability and minimal upkeep are critical, while powered UAVs demand more intensive upkeep to ensure performance and safety.
Technological Advancements in UAV Systems
Glider-based UAVs benefit from aerodynamic efficiency and extended flight duration through advanced materials and real-time environmental sensing technologies, enabling precise thermal exploitation and reduced energy consumption. Powered UAVs showcase breakthroughs in propulsion systems and battery chemistry, enhancing payload capacity, flight range, and autonomous navigation with AI-driven control algorithms. Integration of lightweight sensors and adaptive flight control modules significantly elevates both UAV types in surveillance, mapping, and environmental monitoring applications.
Future Trends in UAV Development
Glider-based UAVs are expected to advance with enhanced energy efficiency and longer endurance through innovations in aerodynamic design and lightweight materials. Powered UAVs will benefit from breakthroughs in battery technology and hybrid propulsion systems, enabling extended flight times and increased payload capacity. Integration of AI-driven autonomous control systems will drive the future evolution of both UAV types, improving mission adaptability and operational safety.
Lift-to-Drag Ratio
Glider-based UAVs typically achieve higher lift-to-drag ratios than powered UAVs, resulting in greater energy efficiency and longer endurance in unpowered flight conditions.
Endurance Range
Glider-based UAVs achieve significantly longer endurance ranges by exploiting natural air currents and thermals, while powered UAVs are limited by onboard fuel or battery capacity.
Launch Mechanism
Glider-based UAVs rely primarily on natural air currents or towlaunch methods for deployment, while powered UAVs use onboard engines for autonomous takeoff and launch.
Propulsion System
Glider-based UAVs utilize aerodynamic lift without onboard propulsion, relying on external forces like thermals or slopes for flight, whereas powered UAVs employ engines or electric motors to generate thrust for sustained and controllable propulsion.
Glide Slope Control
Glider-based UAVs achieve superior glide slope control through aerodynamic efficiency and passive energy management, while powered UAVs rely on active engine thrust adjustments for precise glide slope regulation.
Autonomous Soaring
Glider-based UAVs leveraging autonomous soaring extend flight endurance by using natural air currents, whereas powered UAVs rely on onboard energy, limiting operational duration.
Energy Harvesting (e.g. solar, thermals)
Glider-based UAVs maximize energy harvesting from natural sources like thermals and solar radiation, enabling longer endurance and reduced reliance on onboard power compared to powered UAVs.
Payload Integration
Glider-based UAVs enable lightweight, aerodynamic payload integration for extended flight endurance, while powered UAVs support heavier, more complex payloads due to greater energy availability.
Mission Profile Adaptability
Glider-based UAVs excel in endurance and stealth for long-duration, low-energy missions, while powered UAVs offer greater versatility and speed for dynamic, high-maneuverability mission profiles.
Recovery Techniques
Glider-based UAVs primarily utilize passive recovery techniques like controlled autorotation and precision landing on designated glide paths, whereas powered UAVs rely on powered descent and engine-assisted landing maneuvers for recovery.
glider-based UAV vs powered UAV Infographic