RTOS provides deterministic task scheduling and multitasking capabilities, enabling better resource management and real-time responsiveness compared to bare metal systems. Bare metal programming offers minimal overhead and maximum control by directly interfacing with hardware, which is ideal for simple or time-critical applications. Choosing between RTOS and bare metal depends on the complexity, timing requirements, and scalability of the embedded system design.
Table of Comparison
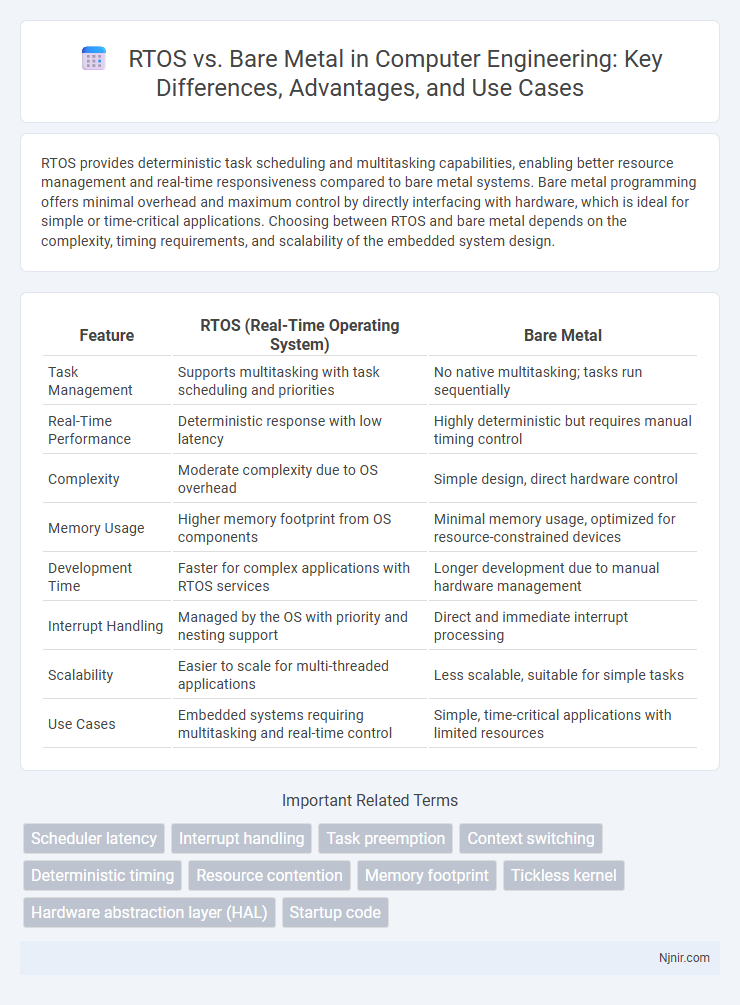
| Feature | RTOS (Real-Time Operating System) | Bare Metal |
|---|---|---|
| Task Management | Supports multitasking with task scheduling and priorities | No native multitasking; tasks run sequentially |
| Real-Time Performance | Deterministic response with low latency | Highly deterministic but requires manual timing control |
| Complexity | Moderate complexity due to OS overhead | Simple design, direct hardware control |
| Memory Usage | Higher memory footprint from OS components | Minimal memory usage, optimized for resource-constrained devices |
| Development Time | Faster for complex applications with RTOS services | Longer development due to manual hardware management |
| Interrupt Handling | Managed by the OS with priority and nesting support | Direct and immediate interrupt processing |
| Scalability | Easier to scale for multi-threaded applications | Less scalable, suitable for simple tasks |
| Use Cases | Embedded systems requiring multitasking and real-time control | Simple, time-critical applications with limited resources |
Introduction to RTOS and Bare Metal Systems
Real-Time Operating Systems (RTOS) provide essential scheduling, multitasking, and resource management capabilities tailored for time-sensitive applications requiring deterministic behavior. Bare metal systems run directly on hardware without an operating system, offering minimal overhead and maximum performance at the cost of increased programming complexity. RTOS frameworks like FreeRTOS, VxWorks, and Zephyr enhance system reliability through task prioritization and interrupt handling, contrasting with bare metal's direct hardware manipulation approach.
Core Architectural Differences
RTOS (Real-Time Operating System) incorporates a kernel that manages task scheduling, inter-task communication, and resource allocation, enabling multitasking and deterministic timing critical for real-time applications. Bare metal programming runs directly on hardware without an OS layer, relying on a single-threaded execution model and manual handling of timing and concurrency. The core architectural difference lies in RTOS providing preemptive multitasking and system services, while bare metal offers minimal overhead and maximum control at the cost of limited scalability and complexity management.
Task Scheduling Mechanisms
RTOS employs preemptive or cooperative task scheduling algorithms, such as priority-based or round-robin, to manage multiple concurrent tasks efficiently and ensure real-time responsiveness. Bare metal systems rely on simple loop-based or interrupt-driven scheduling, limiting multitasking capabilities and task prioritization. The deterministic behavior of RTOS task scheduling provides superior predictability and easier management of time-sensitive operations compared to bare metal implementations.
Resource Management and Efficiency
RTOS provides structured resource management by utilizing scheduling algorithms and priority-based task handling, ensuring efficient CPU and memory use. Bare metal programming offers maximum efficiency with direct hardware access, minimizing overhead but requiring manual resource management. RTOS optimizes multitasking and real-time responsiveness, while bare metal excels in low-latency environments with simpler resource requirements.
Real-Time Performance Considerations
Real-time operating systems (RTOS) provide deterministic task scheduling and interrupt handling that enhance real-time performance compared to bare metal implementations. Bare metal systems offer minimal latency by running application code directly on hardware but lack built-in mechanisms for task prioritization and time management. Choosing between RTOS and bare metal depends on the complexity of timing requirements, with RTOS better suited for applications demanding precise and predictable timing guarantees.
Scalability and System Complexity
RTOS enhances scalability by providing multitasking, real-time scheduling, and resource management, enabling complex systems to handle multiple processes concurrently without significant performance degradation. Bare metal programming offers minimal overhead and direct hardware control but struggles with scalability as increased system complexity demands more manual management of tasks and timing. Systems with evolving requirements and higher complexity benefit from RTOS for modular design and easier maintenance, while bare metal fits simpler, resource-constrained applications requiring deterministic response.
Development and Debugging Tools
Development and debugging tools for RTOS environments typically include task-aware debuggers, real-time trace analyzers, and performance profilers that provide visibility into scheduling, task states, and inter-task communication. Bare-metal development commonly relies on low-level debuggers and hardware debuggers such as JTAG or SWD interfaces, which focus on direct register and memory access without OS abstractions. RTOS toolchains often integrate system-level visualization and timing analysis, making debugging complex multitasking applications more efficient compared to the single-threaded context of bare-metal systems.
Safety, Reliability, and Fault Tolerance
RTOS offers enhanced safety and reliability through built-in task scheduling, memory protection, and real-time monitoring capabilities, which minimize system crashes and data corruption. Bare metal systems, while simpler and with lower latency, lack inherent fault tolerance features, making error detection and recovery more challenging to implement. RTOS environments are better suited for applications requiring rigorous safety standards and fault tolerance, such as automotive and medical devices.
Use Cases and Industry Applications
RTOS excels in complex, real-time applications like automotive control systems, medical devices, and industrial automation where task scheduling and deterministic response are critical. Bare metal programming suits simpler, resource-constrained environments such as basic IoT sensors, hobbyist projects, and low-power embedded devices requiring minimal overhead and maximum performance. Industries like aerospace and telecommunications commonly use RTOS for reliability and multitasking, while consumer electronics and single-purpose embedded systems often favor bare metal for efficiency and cost-effectiveness.
Choosing Between RTOS and Bare Metal
Choosing between RTOS and bare metal depends on system complexity and real-time requirements, where RTOS offers task scheduling, multitasking, and resource management ideal for complex applications. Bare metal programming provides direct hardware control with minimal overhead, suitable for simple, time-critical systems with limited resources. Evaluating factors like response time, scalability, and development complexity helps determine the best fit for embedded system design.
Scheduler latency
RTOS offers significantly lower and more predictable scheduler latency compared to bare metal programming, enabling efficient real-time task management and improved responsiveness.
Interrupt handling
RTOS provides prioritized, nested interrupt handling with real-time guarantees and flexible context switching, whereas bare metal systems handle interrupts sequentially with minimal overhead but lack built-in scheduling and deterministic latency.
Task preemption
RTOS enables efficient task preemption through prioritized scheduling, minimizing latency compared to bare metal systems where task switching relies on manual context management.
Context switching
Context switching in RTOS allows efficient multitasking by saving and restoring task states, while bare metal systems lack this overhead, resulting in faster but less flexible execution.
Deterministic timing
RTOS ensures deterministic timing through predictable task scheduling and interrupt handling, while bare metal systems offer faster response but lack guaranteed timing consistency.
Resource contention
RTOS minimizes resource contention through prioritized task scheduling and synchronization mechanisms, whereas bare metal programming faces increased resource contention due to lack of built-in multitasking and conflict resolution.
Memory footprint
RTOS typically has a larger memory footprint than bare metal due to its built-in kernel and multitasking features, while bare metal systems consume minimal memory by running code directly on hardware without an operating system layer.
Tickless kernel
Tickless kernels in RTOS significantly reduce power consumption by eliminating periodic timer interrupts, unlike bare metal systems that rely on constant tick interrupts for task management.
Hardware abstraction layer (HAL)
RTOS provides a Hardware Abstraction Layer (HAL) that simplifies peripheral management and enhances code portability, whereas bare metal programming requires direct hardware access and manual control without abstraction.
Startup code
RTOS startup code initializes the kernel and hardware abstraction layers for multitasking, while bare metal startup code directly configures hardware and jumps to the main application without OS overhead.
RTOS vs bare metal Infographic