Swarm intelligence leverages decentralized, collective behavior of multiple agents to enhance system adaptability and robustness in aerospace applications. Autonomous control relies on individual decision-making algorithms within a single system for precise navigation and response. Integrating swarm intelligence with autonomous control can create highly resilient and efficient aerospace systems capable of real-time problem solving and complex mission execution.
Table of Comparison
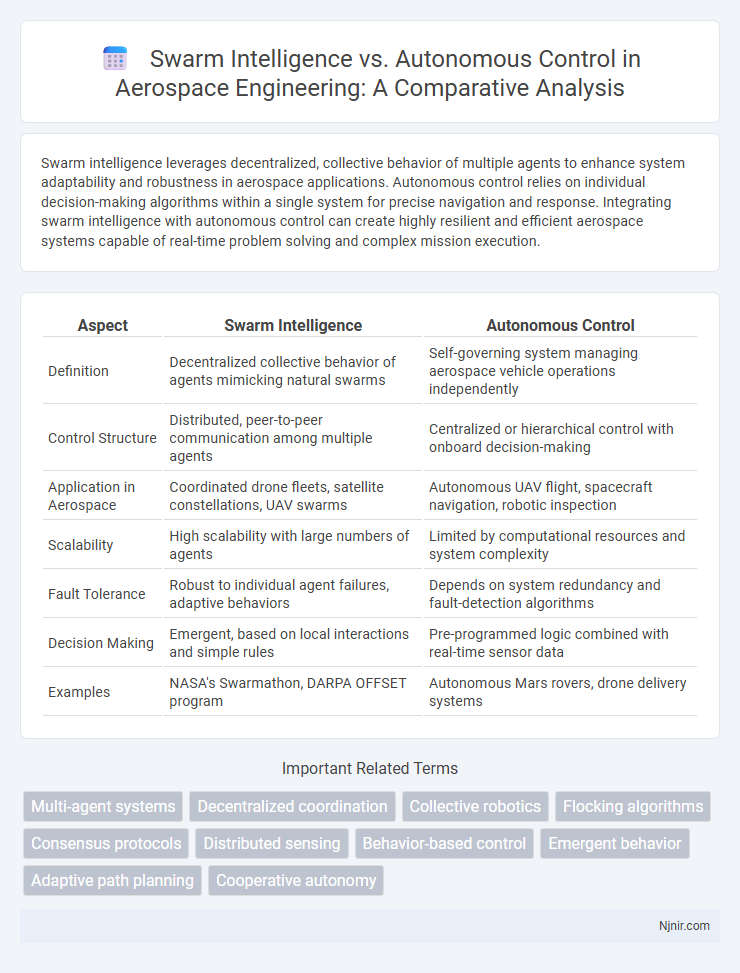
| Aspect | Swarm Intelligence | Autonomous Control |
|---|---|---|
| Definition | Decentralized collective behavior of agents mimicking natural swarms | Self-governing system managing aerospace vehicle operations independently |
| Control Structure | Distributed, peer-to-peer communication among multiple agents | Centralized or hierarchical control with onboard decision-making |
| Application in Aerospace | Coordinated drone fleets, satellite constellations, UAV swarms | Autonomous UAV flight, spacecraft navigation, robotic inspection |
| Scalability | High scalability with large numbers of agents | Limited by computational resources and system complexity |
| Fault Tolerance | Robust to individual agent failures, adaptive behaviors | Depends on system redundancy and fault-detection algorithms |
| Decision Making | Emergent, based on local interactions and simple rules | Pre-programmed logic combined with real-time sensor data |
| Examples | NASA's Swarmathon, DARPA OFFSET program | Autonomous Mars rovers, drone delivery systems |
Introduction to Swarm Intelligence and Autonomous Control
Swarm intelligence is a decentralized approach inspired by the collective behavior of social insects such as ants, bees, and birds, enabling systems to solve complex problems through simple individual agent interactions. Autonomous control refers to systems or robots capable of independently making decisions and adapting to dynamic environments without human intervention. Both paradigms emphasize distributed decision-making, but swarm intelligence leverages emergent behavior from multiple agents, while autonomous control often focuses on individual agent autonomy and real-time adaptability.
Fundamental Principles of Swarm Intelligence
Swarm intelligence relies on decentralized, self-organized systems where simple agents follow local rules to achieve collective behavior without centralized control. Fundamental principles include positive feedback, negative feedback, and amplification mechanisms that enable efficient problem-solving through collective adaptation. In contrast, autonomous control often depends on individual agent autonomy and predetermined decision-making algorithms rather than emergent group dynamics.
Core Concepts in Autonomous Control Systems
Autonomous control systems rely on centralized algorithms designed to manage individual agents or vehicles with predefined objectives and constraints, ensuring precise navigation and task execution. Swarm intelligence, by contrast, emerges from decentralized interactions among simple agents following local rules, leading to complex, adaptive group behavior without centralized control. Core concepts in autonomous control emphasize feedback loops, sensor integration, and decision-making algorithms to maintain system stability and responsiveness in dynamic environments.
Comparative Analysis: Swarm Intelligence vs Autonomous Control
Swarm intelligence leverages decentralized, collective behavior of multiple agents to achieve complex tasks through simple local interactions, promoting robustness and scalability. Autonomous control relies on individual system autonomy with centralized decision-making algorithms engineered for precise, goal-oriented performance and adaptability within specific environments. The comparative analysis highlights swarm intelligence's advantage in distributed problem-solving and fault tolerance, whereas autonomous control excels in structured task execution and real-time responsiveness.
Applications of Swarm Intelligence in Aerospace Engineering
Swarm intelligence in aerospace engineering optimizes satellite formation flying, enabling coordinated maneuvers and efficient communication among multiple satellites. It enhances unmanned aerial vehicle (UAV) swarm deployment for surveillance, search and rescue, and environmental monitoring by distributing tasks dynamically across the swarm. Autonomous control, while effective for individual systems, lacks the collective adaptability and robustness that swarm intelligence provides for complex, multi-agent aerospace missions.
Autonomous Control in Modern Aerospace Systems
Autonomous control in modern aerospace systems relies on advanced algorithms and real-time data processing to enable aircraft and spacecraft to operate independently with minimal human intervention. These systems utilize sensors, machine learning, and adaptive control strategies to optimize navigation, fault detection, and mission planning, enhancing safety and efficiency. Unlike swarm intelligence, which emphasizes collective behavior and decentralized decision-making among multiple agents, autonomous control focuses on the individual system's capability to maintain stability and perform complex tasks in dynamic environments.
Scalability and Robustness in Swarm-Based Architectures
Swarm intelligence excels in scalability due to decentralized control where individual agents operate based on local information, enabling the system to seamlessly expand without significant performance degradation. Robustness is inherent in swarm-based architectures as the failure of individual agents rarely impacts overall system functionality, maintaining collective behavior through redundant interactions. In contrast, autonomous control systems often require centralized oversight, which can limit scalability and present single points of failure, reducing operational robustness under dynamic conditions.
Challenges in Implementing Swarm and Autonomous Systems
Swarm intelligence faces challenges such as ensuring robust decentralized communication and handling dynamic environments with limited computational resources. Autonomous control systems struggle with real-time decision-making under uncertainty and the integration of heterogeneous sensors for reliable perception. Both approaches require advanced algorithms to address scalability, fault tolerance, and adaptive behavior in complex, unpredictable scenarios.
Safety, Reliability, and Decision-Making Approaches
Swarm intelligence leverages decentralized, self-organizing agents to enhance safety through redundancy and fault tolerance, minimizing single points of failure. Autonomous control systems rely on centralized algorithms with defined decision-making protocols, emphasizing reliability via rigorous validation and real-time monitoring. Decision-making in swarm intelligence distributes tasks dynamically among agents, while autonomous control uses predictive models to optimize individual system responses under varying conditions.
Future Trends and Innovations in Aerospace Control Technologies
Future trends in aerospace control technologies emphasize swarm intelligence for decentralized coordination of multiple unmanned aerial vehicles, enhancing mission adaptability and robustness. Autonomous control systems are increasingly integrating advanced machine learning algorithms to enable real-time decision-making and predictive maintenance, reducing human intervention and operational risks. Innovations in sensor fusion and edge computing facilitate seamless communication and data processing among swarm units, driving efficient collaborative behavior in complex, dynamic environments.
Multi-agent systems
Swarm intelligence leverages decentralized coordination and emergent behaviors for robust multi-agent systems, while autonomous control emphasizes individual agent decision-making relying on local sensing and control algorithms.
Decentralized coordination
Swarm intelligence enables decentralized coordination through distributed agent interactions without centralized control, whereas autonomous control often relies on individual system decision-making with limited or hierarchical coordination.
Collective robotics
Swarm intelligence enables collective robotics to achieve decentralized coordination and robust problem-solving through simple agent interactions, whereas autonomous control emphasizes individual robot decision-making and independence.
Flocking algorithms
Flocking algorithms in swarm intelligence enable decentralized, self-organized group behaviors contrasting with autonomous control systems that operate through centralized decision-making for individual agents.
Consensus protocols
Consensus protocols in swarm intelligence enable decentralized agents to collectively make decisions by dynamically sharing information, while autonomous control relies on individual agent optimization without requiring centralized consensus.
Distributed sensing
Swarm intelligence leverages distributed sensing by enabling decentralized agents to collectively process environmental data, whereas autonomous control relies on centralized systems for individual sensor data interpretation and decision-making.
Behavior-based control
Behavior-based control in swarm intelligence leverages decentralized, simple agent interactions to achieve complex group behaviors, contrasting with autonomous control's centralized decision-making systems.
Emergent behavior
Swarm intelligence exhibits emergent behavior through decentralized interactions among simple agents, enabling complex global patterns without centralized control, whereas autonomous control relies on individual agent decision-making often with predefined goals and less emphasis on collective emergence.
Adaptive path planning
Swarm intelligence leverages decentralized, cooperative agents for adaptive path planning, enhancing robustness and scalability compared to autonomous control systems relying on centralized decision-making algorithms.
Cooperative autonomy
Swarm intelligence enhances cooperative autonomy by enabling decentralized autonomous agents to collaboratively solve complex tasks through distributed decision-making and real-time communication.
Swarm intelligence vs Autonomous control Infographic