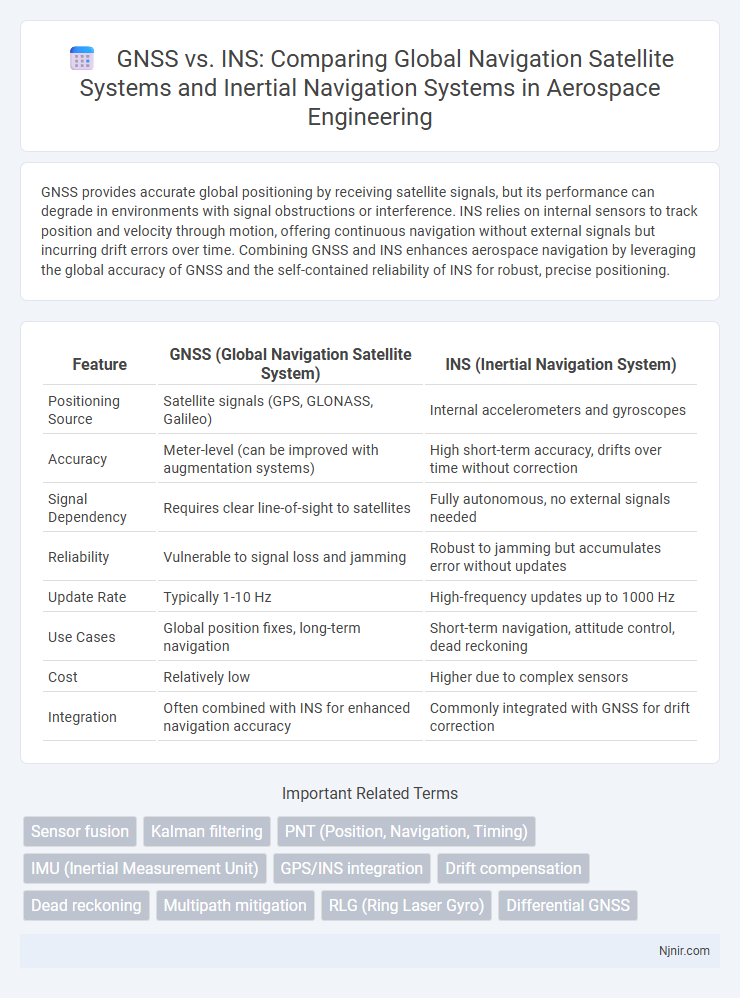
GNSS provides accurate global positioning by receiving satellite signals, but its performance can degrade in environments with signal obstructions or interference. INS relies on internal sensors to track position and velocity through motion, offering continuous navigation without external signals but incurring drift errors over time. Combining GNSS and INS enhances aerospace navigation by leveraging the global accuracy of GNSS and the self-contained reliability of INS for robust, precise positioning.
Table of Comparison
| Feature | GNSS (Global Navigation Satellite System) | INS (Inertial Navigation System) |
|---|---|---|
| Positioning Source | Satellite signals (GPS, GLONASS, Galileo) | Internal accelerometers and gyroscopes |
| Accuracy | Meter-level (can be improved with augmentation systems) | High short-term accuracy, drifts over time without correction |
| Signal Dependency | Requires clear line-of-sight to satellites | Fully autonomous, no external signals needed |
| Reliability | Vulnerable to signal loss and jamming | Robust to jamming but accumulates error without updates |
| Update Rate | Typically 1-10 Hz | High-frequency updates up to 1000 Hz |
| Use Cases | Global position fixes, long-term navigation | Short-term navigation, attitude control, dead reckoning |
| Cost | Relatively low | Higher due to complex sensors |
| Integration | Often combined with INS for enhanced navigation accuracy | Commonly integrated with GNSS for drift correction |
Overview of GNSS and INS Technologies
GNSS (Global Navigation Satellite System) provides precise location data using satellite signals, enabling real-time positioning worldwide with accuracy ranging from meters to centimeters depending on the system and augmentation used. INS (Inertial Navigation System) relies on accelerometers and gyroscopes to track position, velocity, and orientation by measuring the vehicle's motion without external references, offering high-frequency updates and robustness in GPS-denied environments. Combining GNSS with INS enhances navigation accuracy and reliability, compensating for GNSS signal loss through inertial data fusion and sensor calibration.
Principle of Operation: GNSS vs INS
GNSS operates by triangulating satellite signals to determine precise global positions using time-stamped data from multiple satellites. INS relies on accelerometers and gyroscopes to measure velocity, orientation, and gravitational forces, calculating position through dead reckoning without external references. GNSS provides absolute positioning with high accuracy but can suffer from signal loss, whereas INS offers continuous navigation data independently, though it experiences drift over time.
Accuracy and Reliability Comparison
GNSS provides high accuracy positioning by using satellite signals but can suffer from signal loss or multipath errors in urban or obstructed environments. INS offers continuous, self-contained navigation by measuring accelerations and rotations but accumulates drift over time without external reference updates. Combining GNSS with INS enhances reliability and accuracy, as GNSS corrects INS drift while INS maintains navigation during GNSS outages.
Signal Vulnerabilities and Interference
GNSS signals are highly susceptible to jamming, spoofing, and signal degradation due to atmospheric conditions or physical obstructions, making them vulnerable in hostile or urban environments. INS operates independently of external signals, utilizing accelerometers and gyroscopes to maintain accurate navigation but suffers from cumulative errors causing drift over time without external updates. Combining GNSS with INS allows continuous navigation accuracy, where GNSS corrects INS drift and INS provides resilience against GNSS signal interruptions.
Integration Strategies: GNSS/INS Hybrid Systems
GNSS/INS hybrid systems combine Global Navigation Satellite System data with Inertial Navigation System measurements to enhance positioning accuracy, reliability, and robustness in dynamic environments. Integration strategies typically employ tightly coupled or loosely coupled architectures, where tightly coupled systems process raw GNSS measurements with inertial data to improve performance under challenging signal conditions. These hybrid configurations leverage the complementary strengths of GNSS satellite signals and INS inertial sensors, reducing drift errors and mitigating signal outages in applications such as autonomous vehicles and aerospace navigation.
Performance in Different Aerospace Environments
GNSS provides high-accuracy positioning and velocity data but suffers from signal blockages and multipath errors in urban canyons, dense foliage, or during high-dynamic aerospace maneuvers. INS delivers continuous, drift-prone inertial measurements capable of functioning independently of external signals, making it ideal for short-term navigation in GPS-denied environments such as underwater, indoors, or during rapid aircraft maneuvers. Integrating GNSS with INS enhances overall performance by compensating for INS drift with GNSS updates, enabling robust, accurate navigation across diverse aerospace environments.
Cost and Implementation Factors
GNSS systems typically offer lower costs and simpler implementation due to reliance on satellite signals and minimal onboard hardware, making them suitable for a wide range of commercial applications. INS requires expensive sensors such as accelerometers and gyroscopes with complex calibration processes, leading to higher initial and maintenance costs. Combining GNSS with INS improves accuracy and reliability, but increases overall system cost and integration complexity.
Maintenance and Lifecycle Considerations
GNSS systems require regular software updates and antenna calibrations to maintain signal accuracy, while INS units demand periodic sensor calibrations and IMU replacements to prevent drift over time. INS lifecycle costs tend to be higher due to wear on mechanical components like gyroscopes and accelerometers, necessitating scheduled maintenance and component overhauls. GNSS receivers have longer service intervals but are susceptible to environmental disruptions, whereas INS operates independently of external signals but requires consistent upkeep to ensure precision.
Current Applications in Aerospace Navigation
GNSS provides precise global positioning by receiving satellite signals, making it essential for commercial aviation and satellite launches. INS offers continuous, self-contained navigation through accelerometers and gyroscopes, critical for missile guidance and aircraft autonomy where GPS signals are unavailable or unreliable. Combining GNSS with INS enhances aerospace navigation accuracy, enabling resilient flight control and mission success in complex environments.
Future Trends in Aerospace Navigation Systems
Future aerospace navigation systems are increasingly integrating GNSS with INS to enhance accuracy, reliability, and resistance to signal loss or jamming. Advanced sensor fusion algorithms and AI-powered data processing improve real-time positioning by combining satellite data with inertial measurement unit outputs. Emerging technologies such as quantum sensors and multi-constellation GNSS promise significant advancements in precision and robustness for autonomous aerospace navigation.
Sensor fusion
Sensor fusion combines GNSS's precise global positioning with INS's continuous motion tracking to enhance navigation accuracy and reliability in dynamic environments.
Kalman filtering
Kalman filtering enhances GNSS and INS integration by optimally fusing satellite positioning data with inertial sensor measurements to improve navigation accuracy and reliability.
PNT (Position, Navigation, Timing)
GNSS provides global Position, Navigation, and Timing (PNT) with high accuracy but relies on external signals vulnerable to interference, while INS offers self-contained PNT capabilities using internal sensors that excel in short-term accuracy and robustness in GNSS-denied environments.
IMU (Inertial Measurement Unit)
IMU-based INS provides continuous, high-frequency motion data independent of external signals, while GNSS offers absolute positioning but requires satellite visibility and is susceptible to signal loss or interference.
GPS/INS integration
GPS/INS integration enhances navigation accuracy by combining Global Navigation Satellite System signals with Inertial Navigation System sensors, enabling precise positioning and reliable navigation in GPS-denied environments.
Drift compensation
GNSS provides long-term position accuracy by correcting INS drift through satellite-based signals, enabling precise drift compensation in inertial navigation systems.
Dead reckoning
Dead reckoning in INS uses internal sensors to estimate position between GNSS updates, enabling navigation when satellite signals are unavailable but prone to cumulative errors over time.
Multipath mitigation
GNSS systems rely on satellite signals susceptible to multipath errors, while INS provides continuous navigation data unaffected by multipath, making combined GNSS/INS integration essential for robust multipath mitigation.
RLG (Ring Laser Gyro)
Ring Laser Gyro (RLG)-based Inertial Navigation Systems (INS) provide high-precision angular velocity measurements, outperforming GNSS in environments with signal obstructions or jamming by offering continuous, drift-corrected navigation data.
Differential GNSS
Differential GNSS enhances the positional accuracy of traditional GNSS by using fixed ground-based reference stations to correct satellite signal errors, outperforming standalone INS in long-term drift reduction and real-time navigation precision.
GNSS vs INS (Inertial Navigation System) Infographic