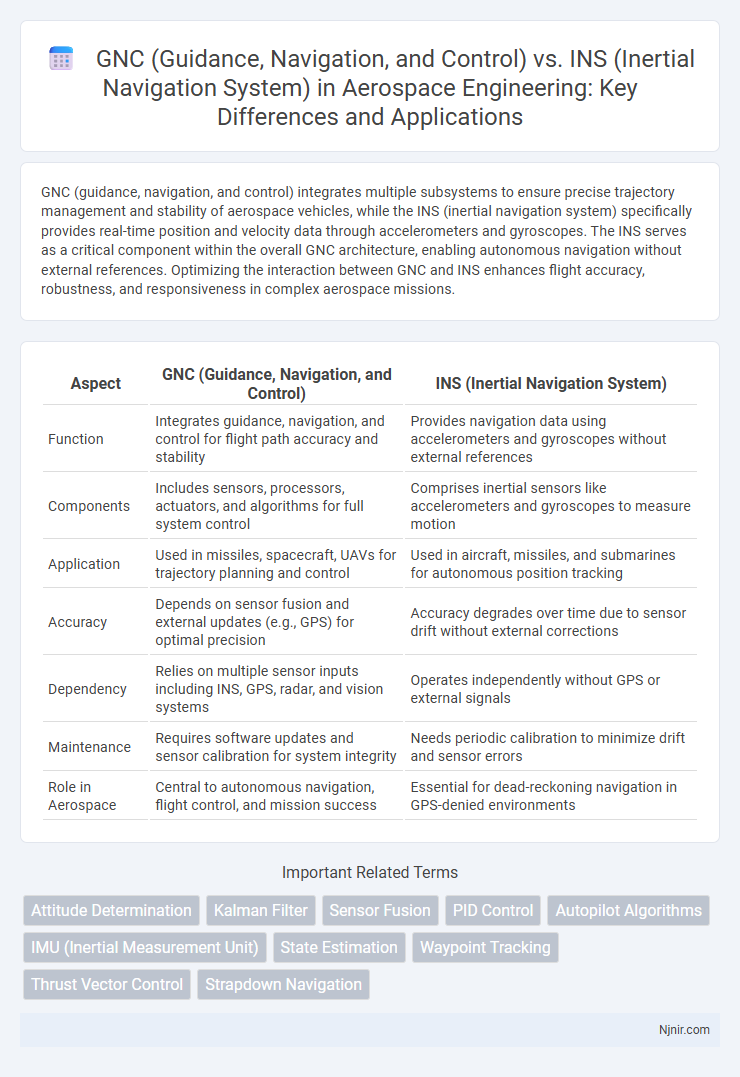
GNC (guidance, navigation, and control) integrates multiple subsystems to ensure precise trajectory management and stability of aerospace vehicles, while the INS (inertial navigation system) specifically provides real-time position and velocity data through accelerometers and gyroscopes. The INS serves as a critical component within the overall GNC architecture, enabling autonomous navigation without external references. Optimizing the interaction between GNC and INS enhances flight accuracy, robustness, and responsiveness in complex aerospace missions.
Table of Comparison
| Aspect | GNC (Guidance, Navigation, and Control) | INS (Inertial Navigation System) |
|---|---|---|
| Function | Integrates guidance, navigation, and control for flight path accuracy and stability | Provides navigation data using accelerometers and gyroscopes without external references |
| Components | Includes sensors, processors, actuators, and algorithms for full system control | Comprises inertial sensors like accelerometers and gyroscopes to measure motion |
| Application | Used in missiles, spacecraft, UAVs for trajectory planning and control | Used in aircraft, missiles, and submarines for autonomous position tracking |
| Accuracy | Depends on sensor fusion and external updates (e.g., GPS) for optimal precision | Accuracy degrades over time due to sensor drift without external corrections |
| Dependency | Relies on multiple sensor inputs including INS, GPS, radar, and vision systems | Operates independently without GPS or external signals |
| Maintenance | Requires software updates and sensor calibration for system integrity | Needs periodic calibration to minimize drift and sensor errors |
| Role in Aerospace | Central to autonomous navigation, flight control, and mission success | Essential for dead-reckoning navigation in GPS-denied environments |
Introduction to Aerospace GNC and INS
Guidance, Navigation, and Control (GNC) systems integrate algorithms and sensors to direct aerospace vehicles along desired trajectories with high precision and stability. Inertial Navigation Systems (INS) specifically utilize accelerometers and gyroscopes to compute position, velocity, and orientation without external references, serving as a critical subsystem within comprehensive GNC frameworks. These technologies underpin aerospace navigation by enabling autonomous, robust, and real-time state estimation essential for mission success.
Core Concepts: Defining GNC and INS
Guidance, Navigation, and Control (GNC) is an integrated framework that manages the trajectory, orientation, and stability of vehicles, combining complex algorithms for real-time decision-making. Inertial Navigation System (INS) is a crucial subset of GNC, utilizing accelerometers and gyroscopes to continuously calculate position, velocity, and attitude without external references. While GNC encompasses the full spectrum of path planning, positioning, and control, INS specifically provides autonomous navigation based on inertial sensing technologies.
Functional Differences Between GNC and INS
GNC (Guidance, Navigation, and Control) encompasses a comprehensive system responsible for determining a vehicle's desired trajectory, establishing its current position, and commanding actuators to follow the planned path. INS (Inertial Navigation System) is a critical component within navigation, utilizing accelerometers and gyroscopes to provide continuous position, velocity, and orientation data without external references. The primary functional difference lies in GNC's broader scope integrating guidance algorithms and control laws, while INS focuses solely on self-contained measurement of motion parameters to support navigation accuracy.
Key Components of GNC Systems
Key components of GNC (guidance, navigation, and control) systems include sensors, processors, and actuators that work together to determine the vehicle's position, plan its trajectory, and execute control commands. Inertial Navigation Systems (INS) serve as a critical subset of GNC by providing precise position and velocity data using accelerometers and gyroscopes without external references. GNC systems integrate INS data with additional navigation aids such as GPS and control algorithms to achieve accurate and stable guidance and maneuvering in aerospace, marine, and autonomous vehicle applications.
INS Architecture and Working Principles
INS (Inertial Navigation System) architecture consists of accelerometers and gyroscopes integrated into an inertial measurement unit (IMU) that measures linear accelerations and angular velocities to compute position, velocity, and attitude. The working principle involves continuous dead reckoning by integrating acceleration and rotation data to update the navigation solution without external references. INS operates autonomously within the GNC framework, providing real-time state estimation vital for guidance, navigation, and control accuracy in aerospace and maritime applications.
Role of Sensors in GNC and INS
GNC integrates multiple sensors, including GPS, star trackers, and inertial measurement units (IMUs), to provide comprehensive guidance, navigation, and control by processing real-time data for trajectory planning and vehicle stability. INS primarily relies on accelerometers and gyroscopes within the IMU to calculate position, velocity, and orientation autonomously, without external references. The combination of these sensors in GNC enhances accuracy and robustness, while INS offers self-contained navigation crucial for scenarios with GPS-denied environments.
Integration of INS Within GNC Frameworks
The integration of an Inertial Navigation System (INS) within Guidance, Navigation, and Control (GNC) frameworks enhances the accuracy and reliability of vehicle positioning and motion estimation. INS provides continuous measurement of velocity, orientation, and gravitational forces using accelerometers and gyroscopes, which GNC algorithms utilize to optimize trajectory control and navigation decisions in real time. Fusion of INS data with external sensors such as GPS in GNC systems improves robustness against signal loss or jamming, ensuring precise guidance and stable control in dynamic environments.
Performance Metrics: Accuracy, Reliability, and Robustness
GNC (Guidance, Navigation, and Control) encompasses a broader system integrating sensor data, algorithms, and actuators to achieve precise vehicle trajectory management, while INS (Inertial Navigation System) specifically relies on accelerometers and gyroscopes to compute position and velocity independently of external references. Performance metrics such as accuracy highlight INS's drift over time due to sensor errors, whereas GNC systems enhance overall navigation precision by fusing INS data with GPS and other sensors. Reliability and robustness in GNC are superior as the multi-sensor fusion approach mitigates individual sensor failures and environmental disturbances, unlike standalone INS which can degrade in challenging dynamic conditions.
Applications of GNC vs. INS in Aerospace
GNC systems integrate guidance, navigation, and control functions to provide real-time trajectory planning, attitude regulation, and flight path optimization essential for spacecraft, missiles, and UAVs operations. INS relies exclusively on accelerometers and gyroscopes to compute position, velocity, and orientation without external references, making it crucial for autonomous navigation in GPS-denied environments such as deep-space missions and military aircraft. The combination of GNC with INS enhances aerospace vehicle precision by utilizing INS data for navigation while GNC systems execute corrective maneuvers and mission-specific controls.
Future Trends in GNC and INS Technologies
Future trends in GNC and INS technologies emphasize enhanced integration with AI-driven algorithms and machine learning for improved real-time decision-making and accuracy. Advances in miniaturization and sensor fusion enable more robust and reliable autonomous navigation in complex environments. Quantum sensors and next-generation inertial measurement units (IMUs) promise significant improvements in precision, reducing drift and enhancing long-term operational stability.
Attitude Determination
GNC systems integrate multiple sensors including INS to achieve precise attitude determination by combining inertial measurements with external references for enhanced accuracy and stability.
Kalman Filter
Kalman Filter enhances GNC systems by integrating INS sensor data to optimally estimate navigation states, improving accuracy and robustness in dynamic environments.
Sensor Fusion
Sensor fusion in GNC integrates data from INS accelerometers and gyroscopes with external sensors like GPS to enhance navigation accuracy and system robustness.
PID Control
PID control enhances GNC systems by providing precise real-time adjustments in guidance, navigation, and control, whereas INS primarily relies on sensor data integration without inherent feedback control mechanisms.
Autopilot Algorithms
Autopilot algorithms integrate GNC systems by combining guidance, navigation, and control to enhance trajectory precision, whereas INS specifically provides inertial data for accurate position and velocity estimation within the navigation component.
IMU (Inertial Measurement Unit)
The IMU, a critical sensor in both GNC systems and INS, provides real-time measurements of acceleration and angular velocity essential for accurate navigation and control.
State Estimation
GNC integrates INS's inertial sensors with external data sources to enhance state estimation accuracy by combining sensor fusion algorithms and control feedback loops.
Waypoint Tracking
GNC systems integrate INS for precise waypoint tracking by combining inertial measurements with guidance algorithms to enhance navigation accuracy and control stability.
Thrust Vector Control
Thrust Vector Control (TVC) enhances GNC systems by precisely directing propulsion forces, while INS provides critical inertial data for real-time navigation adjustments in aerospace applications.
Strapdown Navigation
Strapdown navigation in GNC integrates inertial sensors rigidly mounted to the vehicle, contrasting with traditional INS that rely on gimbaled platforms for stabilizing measurements and enabling precise real-time attitude, position, and velocity estimation.
GNC (guidance, navigation, and control) vs INS (inertial navigation system) Infographic