IMU provides precise motion and orientation data through accelerometers and gyroscopes, crucial for real-time navigation in marine engineering where GPS signals may be unavailable or unreliable. Marine vessels rely on IMU for accurate positioning during underwater operations or in environments with GPS signal obstruction. Integrating IMU with GPS enhances overall navigation accuracy, combining GPS's global positioning data with IMU's high-frequency motion sensing.
Table of Comparison
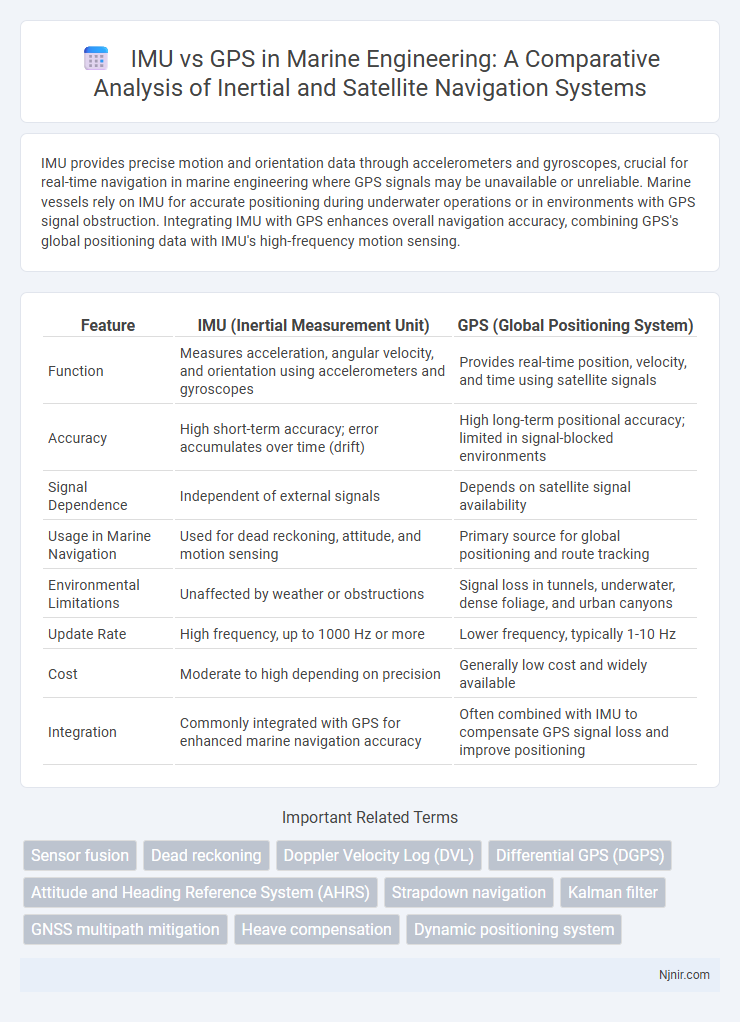
| Feature | IMU (Inertial Measurement Unit) | GPS (Global Positioning System) |
|---|---|---|
| Function | Measures acceleration, angular velocity, and orientation using accelerometers and gyroscopes | Provides real-time position, velocity, and time using satellite signals |
| Accuracy | High short-term accuracy; error accumulates over time (drift) | High long-term positional accuracy; limited in signal-blocked environments |
| Signal Dependence | Independent of external signals | Depends on satellite signal availability |
| Usage in Marine Navigation | Used for dead reckoning, attitude, and motion sensing | Primary source for global positioning and route tracking |
| Environmental Limitations | Unaffected by weather or obstructions | Signal loss in tunnels, underwater, dense foliage, and urban canyons |
| Update Rate | High frequency, up to 1000 Hz or more | Lower frequency, typically 1-10 Hz |
| Cost | Moderate to high depending on precision | Generally low cost and widely available |
| Integration | Commonly integrated with GPS for enhanced marine navigation accuracy | Often combined with IMU to compensate GPS signal loss and improve positioning |
Introduction to IMU and GPS in Marine Engineering
In marine engineering, IMUs (Inertial Measurement Units) provide precise measurements of angular velocity and linear acceleration, enabling real-time tracking of vessel orientation and motion without reliance on external signals. GPS (Global Positioning System) offers accurate global positioning data by receiving satellite signals, essential for navigation and route planning over large water bodies. Combining IMU and GPS systems enhances maritime navigation accuracy by compensating for GPS signal limitations in dense environments and providing continuous motion sensing.
Fundamental Principles: How IMU and GPS Work
An Inertial Measurement Unit (IMU) operates by measuring linear acceleration and angular velocity using accelerometers and gyroscopes, enabling the calculation of position, orientation, and velocity through dead reckoning and sensor fusion techniques. The Global Positioning System (GPS) determines precise geographic location by triangulating signals from multiple satellites, utilizing the time delay of radio signals to calculate latitude, longitude, and altitude. While IMUs provide continuous motion tracking independent of external signals, GPS offers absolute positioning but relies on satellite visibility and signal reception.
Accuracy Comparison: IMU vs GPS
IMU (Inertial Measurement Unit) offers high-frequency motion data with precise short-term accuracy by measuring acceleration and angular velocity, while GPS (Global Positioning System) provides global positioning with long-term stability but lower update rates and susceptibility to signal obstruction. IMU accuracy degrades over time due to sensor drift, requiring calibration or correction from external references such as GPS for sustained precision. GPS accuracy typically ranges from 3 to 10 meters in open environments, whereas high-grade IMUs can achieve centimeter-level precision in controlled conditions but need integration with GPS for reliable real-time navigation.
Reliability in Marine Environments
In marine environments, IMUs provide highly reliable motion and orientation data even during GPS signal loss caused by obstructions or atmospheric interference. GPS offers essential position accuracy but suffers from signal degradation in harsh weather or undersea conditions, reducing its dependability. Combining IMU with GPS enhances navigation reliability by leveraging continuous inertial sensing alongside periodic satellite corrections.
Response Time and Data Update Rates
IMU (Inertial Measurement Unit) provides response times in the range of microseconds to milliseconds, offering high-frequency data updates typically between 100 Hz to 1000 Hz, enabling rapid motion tracking and real-time navigation. GPS (Global Positioning System) generally features slower response times with data update rates around 1 Hz to 10 Hz, constrained by satellite signal processing and atmospheric delays, limiting its utility for high-speed or rapidly changing motion analysis. The high update rate and low latency of IMUs make them essential for precise, immediate orientation and velocity measurements, while GPS excels in providing accurate positional data over longer time frames.
Integration of IMU and GPS Systems
The integration of IMU (Inertial Measurement Unit) and GPS (Global Positioning System) systems enhances navigation accuracy by combining IMU's high-frequency motion data with GPS's global position fixes. This fusion leverages IMU's capability to provide continuous attitude, velocity, and position information during GPS signal loss or degradation. Advanced sensor fusion algorithms such as Kalman filters improve robustness and reliability in dynamic environments by correcting IMU drift errors with precise GPS updates.
Application Scenarios: When to Use IMU, GPS, or Both
IMUs excel in applications requiring high-frequency motion tracking and orientation data, such as drone stabilization and indoor navigation, where GPS signals are weak or unavailable. GPS is ideal for outdoor positioning with global coverage, providing accurate location data for vehicle tracking, mapping, and route planning. Combining IMU and GPS integrates relative motion sensing with absolute positioning, enhancing performance in autonomous vehicles, robotics, and augmented reality by compensating for GPS signal loss and improving navigation accuracy.
Challenges and Limitations of IMU and GPS
IMU faces challenges such as sensor drift, bias errors, and noise accumulation, which degrade accuracy over time without external corrections. GPS is limited by signal obstructions, multipath errors, and reduced availability in urban canyons, tunnels, or dense foliage. Combining IMU and GPS can mitigate individual limitations but requires complex sensor fusion algorithms to ensure reliable positioning data.
Cost Considerations in Marine Engineering Projects
IMU systems typically involve higher initial costs due to advanced sensors and calibration requirements but offer continuous motion tracking essential for precise marine navigation. GPS solutions provide cost-effective positioning with widespread availability but may suffer from signal loss or inaccuracies in obstructed marine environments. Evaluating total project expenses must include maintenance, reliability, and operational constraints to optimize budget allocation in marine engineering applications.
Future Trends in Marine Navigation Technology
IMU (Inertial Measurement Unit) and GPS (Global Positioning System) are increasingly integrated to enhance precision in marine navigation, with future trends emphasizing hybrid systems that combine IMU's high-frequency motion data and GPS's global location accuracy. Advances in sensor fusion algorithms and artificial intelligence are expected to improve real-time positioning reliability in challenging environments such as deep waters and under harsh weather conditions. Emerging technologies like quantum navigation and enhanced GNSS constellations will further augment the accuracy and resilience of marine navigation systems.
Sensor fusion
Sensor fusion combines IMU's high-frequency motion tracking with GPS's absolute positioning to enhance accuracy and reliability in navigation systems.
Dead reckoning
IMU-based dead reckoning provides continuous position tracking by integrating acceleration and rotation data, while GPS offers absolute positioning but can suffer from signal loss, making IMU essential for maintaining navigation accuracy when GPS signals are unavailable.
Doppler Velocity Log (DVL)
Doppler Velocity Log (DVL) provides highly accurate underwater velocity measurements by measuring Doppler shifts of acoustic signals, complementing an IMU's inertial data and overcoming GPS's unavailability in submerged environments.
Differential GPS (DGPS)
Differential GPS (DGPS) enhances positional accuracy by correcting satellite signals with ground-based reference stations, whereas IMUs provide continuous motion and orientation data independent of satellite signals, making DGPS superior for precise outdoor navigation but IMUs crucial for short-term positioning where GPS signals are weak or unavailable.
Attitude and Heading Reference System (AHRS)
IMU-based Attitude and Heading Reference Systems (AHRS) provide high-frequency, drift-corrected orientation data by integrating gyroscope, accelerometer, and magnetometer measurements, whereas GPS-based systems offer accurate global positioning but lack precise real-time attitude and heading information essential for navigation and control.
Strapdown navigation
Strapdown navigation uses IMU sensors for precise inertial data integration, providing continuous position and orientation updates, while GPS offers external absolute positioning but suffers from signal loss and latency.
Kalman filter
Kalman filters enhance IMU accuracy by fusing inertial sensor data with GPS signals, mitigating drift and providing precise real-time position and velocity estimates.
GNSS multipath mitigation
IMUs provide accurate short-term motion data unaffected by GNSS multipath errors, making them essential for enhancing position reliability where GPS signals are degraded by multipath reflections.
Heave compensation
IMU-based heave compensation provides high-frequency vertical motion accuracy by measuring real-time acceleration and angular velocity, while GPS heave compensation relies on satellite data that may lag and offer lower resolution in dynamic marine environments.
Dynamic positioning system
IMUs provide high-frequency, precise motion and orientation data essential for dynamic positioning systems, while GPS offers global location accuracy but with lower update rates and susceptibility to signal loss in challenging environments.
IMU (Inertial Measurement Unit) vs GPS (Global Positioning System) Infographic