Autonomous robots operate independently using sensors and artificial intelligence to perform tasks without human intervention, enhancing efficiency in complex mechanical engineering environments. Teleoperated robots rely on direct human control through remote interfaces, offering precision in situations requiring real-time decision-making and adaptability. The choice between autonomous and teleoperated systems depends on the specific application's demands for autonomy, control accuracy, and environmental complexity.
Table of Comparison
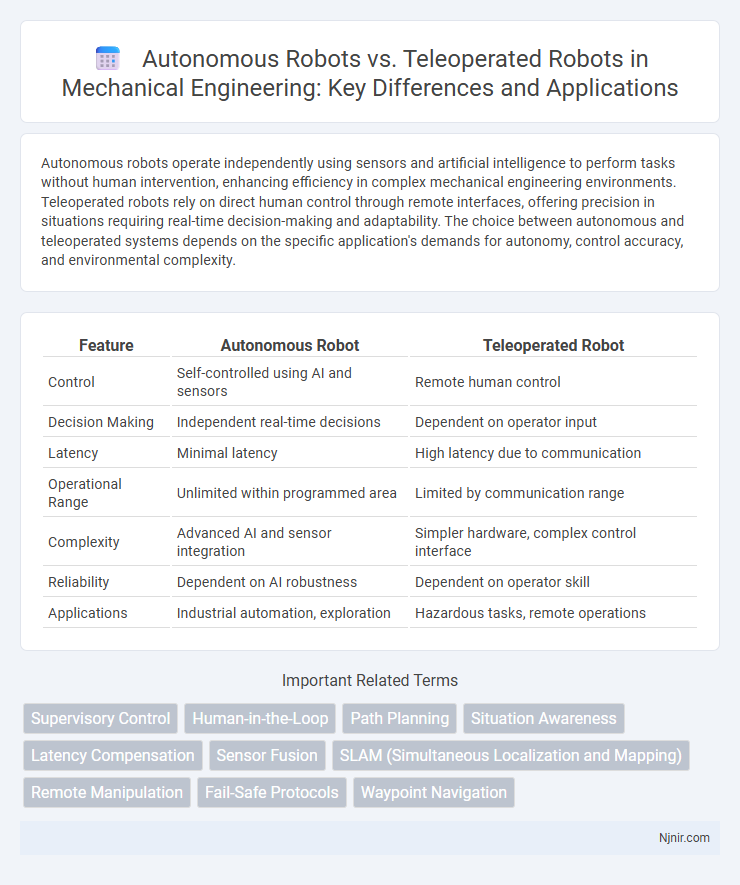
| Feature | Autonomous Robot | Teleoperated Robot |
|---|---|---|
| Control | Self-controlled using AI and sensors | Remote human control |
| Decision Making | Independent real-time decisions | Dependent on operator input |
| Latency | Minimal latency | High latency due to communication |
| Operational Range | Unlimited within programmed area | Limited by communication range |
| Complexity | Advanced AI and sensor integration | Simpler hardware, complex control interface |
| Reliability | Dependent on AI robustness | Dependent on operator skill |
| Applications | Industrial automation, exploration | Hazardous tasks, remote operations |
Introduction to Autonomous and Teleoperated Robots
Autonomous robots operate independently using sensors, artificial intelligence, and pre-programmed algorithms to perform tasks without human intervention. Teleoperated robots are remotely controlled by human operators who guide their actions through real-time input devices, allowing precise manipulation in complex or hazardous environments. Understanding the distinction between these robots highlights the balance between human control and machine autonomy in robotic applications.
Core Principles of Autonomous Robotics
Autonomous robots operate based on advanced algorithms, sensors, and artificial intelligence, enabling real-time decision-making without human intervention, unlike teleoperated robots that rely on continuous human control through remote interfaces. Core principles of autonomous robotics include perception to interpret environmental data, localization to determine their position within a space, and navigation for path planning and obstacle avoidance. These principles drive efficiency and adaptability in diverse applications such as exploration, manufacturing, and service industries.
Teleoperation: Definition and Mechanisms
Teleoperated robots are controlled remotely by human operators who use interfaces such as joysticks, control panels, or virtual reality systems to manipulate the robot in real time. These systems rely on continuous data transmission between the operator and the robot, often incorporating sensors and cameras to provide visual and tactile feedback for precise movements. Teleoperation mechanisms enable human control in environments where autonomous decision-making is limited or risky, such as hazardous zones or space exploration.
System Architecture Comparison
Autonomous robots feature integrated sensor fusion, onboard processing units, and decision-making algorithms enabling real-time environmental perception and independent task execution. Teleoperated robots rely on remote control interfaces, communication links, and operator-driven commands to perform tasks, often incorporating feedback systems like cameras and haptic devices for situational awareness. The architectural difference centers on autonomy levels, with autonomous systems emphasizing embedded intelligence and teleoperated systems prioritizing remote human control and communication reliability.
Sensing and Perception Capabilities
Autonomous robots rely on advanced sensing and perception technologies such as LIDAR, computer vision, and ultrasonic sensors to independently interpret their environment and make real-time decisions. Teleoperated robots depend on remote human operators who interpret sensory data transmitted via cameras, microphones, and haptic feedback devices, limiting responsiveness and adaptability to dynamic situations. The key distinction lies in the autonomous robot's ability to process multi-modal sensor fusion for situational awareness, whereas teleoperated systems depend on external input for perception and action.
Human-Robot Interaction Dynamics
Autonomous robots operate with minimal human input, relying on advanced sensors and AI algorithms to interpret environments and make decisions, which enhances efficiency but reduces direct human control. Teleoperated robots depend on a human operator for real-time control, allowing precise task execution in complex or hazardous settings while maintaining direct human judgment and adaptability. The dynamics in human-robot interaction shift from collaborative oversight in teleoperation to supervisory and intervention roles in autonomy, emphasizing the balance between control, trust, and responsiveness.
Industrial Applications and Use Cases
Autonomous robots in industrial applications perform complex tasks such as assembly, inspection, and material handling with high precision and minimal human intervention, enhancing productivity and reducing operational costs. Teleoperated robots are preferred in hazardous or remote environments, allowing human operators to control robots for tasks like equipment maintenance and hazardous material handling, ensuring safety and real-time decision-making. Both types of robots are integral to modern manufacturing, with autonomous systems optimizing repetitive processes and teleoperated robots providing flexibility in unpredictable or dangerous situations.
Safety and Risk Management
Autonomous robots leverage advanced sensors and AI algorithms to detect hazards and make real-time decisions, significantly reducing human exposure to dangerous environments and minimizing operational risks. Teleoperated robots rely on human operators for control, which introduces potential delays and human error, increasing safety challenges in high-risk scenarios. Implementing robust safety protocols and fail-safe mechanisms is critical for both systems to mitigate risks and ensure secure interaction with their environments.
Performance Metrics and Evaluation
Autonomous robots demonstrate superior performance in task efficiency and adaptability, evaluated through metrics such as accuracy, execution time, and error rates under variable conditions. Teleoperated robots rely heavily on human input, with performance measured by operator response time, control precision, and communication latency. Comparative evaluations highlight that autonomous systems excel in repetitive or hazardous environments, while teleoperated robots perform better in complex tasks requiring human judgment and fine manipulation.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the integration of advanced AI algorithms and machine learning to enhance autonomous robots' decision-making and adaptability, enabling them to perform complex tasks with minimal human intervention. Teleoperated robots are evolving with improved haptic feedback and real-time data transmission technologies, allowing precise remote control in hazardous or inaccessible environments. Hybrid systems combining autonomous functions with teleoperation capabilities are emerging, promising increased flexibility and efficiency in diverse applications such as healthcare, exploration, and manufacturing.
Supervisory Control
Supervisory control enables operators to manage teleoperated robots remotely by providing high-level commands while autonomous robots execute complex tasks independently using onboard intelligence and sensors.
Human-in-the-Loop
Autonomous robots operate independently using AI algorithms, whereas teleoperated robots require continuous human-in-the-loop control for real-time decision-making and maneuvering.
Path Planning
Autonomous robots utilize advanced algorithms and sensor data for real-time path planning and obstacle avoidance, whereas teleoperated robots rely on human operators to manually control navigation and make path decisions.
Situation Awareness
Autonomous robots enhance situation awareness by independently perceiving and interpreting environmental data through advanced sensors and algorithms, whereas teleoperated robots rely on human operators' remote perception and decision-making capabilities, which can be limited by communication latency and restricted sensory feedback.
Latency Compensation
Autonomous robots utilize advanced onboard processing and sensor fusion to minimize latency, while teleoperated robots rely on predictive algorithms and local feedback loops to compensate for communication delays between the operator and the remote device.
Sensor Fusion
Autonomous robots leverage advanced sensor fusion techniques combining data from LiDAR, cameras, and inertial measurement units to enable real-time, independent decision-making, whereas teleoperated robots rely primarily on individual sensor inputs for remote human control and lack integrated sensor fusion for autonomy.
SLAM (Simultaneous Localization and Mapping)
Autonomous robots utilize advanced SLAM algorithms for real-time environment mapping and self-localization, while teleoperated robots depend on remote SLAM data processing and operator input for navigation accuracy.
Remote Manipulation
Autonomous robots perform remote manipulation independently using AI and sensors, while teleoperated robots rely on human operators to control movements remotely in real-time.
Fail-Safe Protocols
Autonomous robots utilize advanced fail-safe protocols including redundant sensors and real-time self-diagnostics to ensure safe operation without human intervention, while teleoperated robots rely on manual override fail-safes and continuous human monitoring to prevent accidents during remote control.
Waypoint Navigation
Autonomous robots use advanced sensors and AI algorithms for real-time waypoint navigation without human input, while teleoperated robots rely on remote operators to manually control movement between waypoints.
Autonomous robot vs Teleoperated robot Infographic